



Electronic Cats
Flipper Add-On CANBus – CAN Bus Network Testing
Flipper Add-On CANBus – CAN Bus Network Testing
Couldn't load pickup availability
Last 2 in stock.
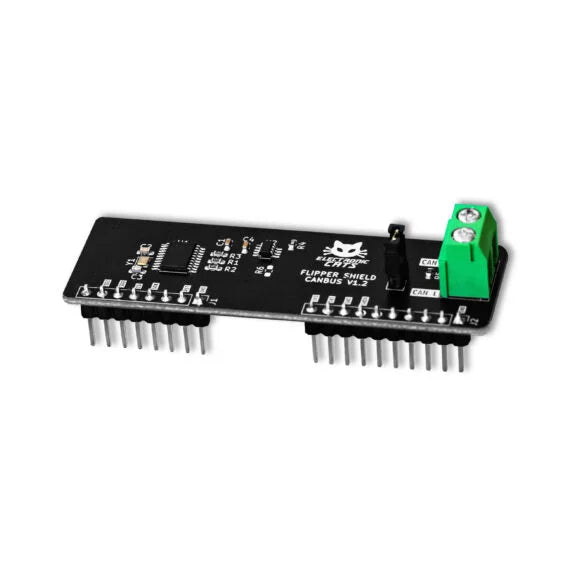
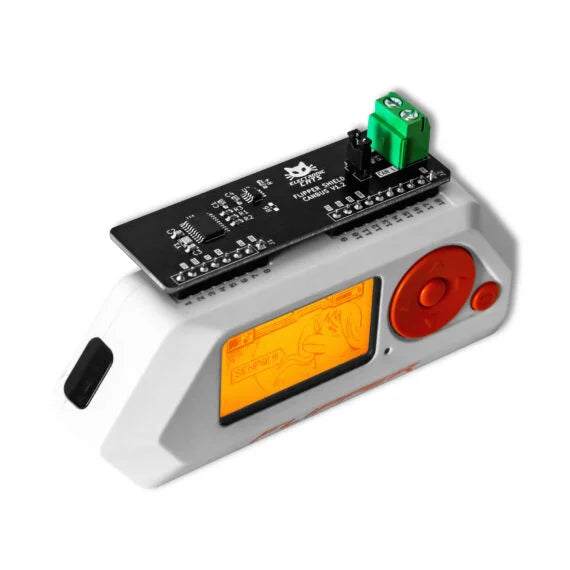
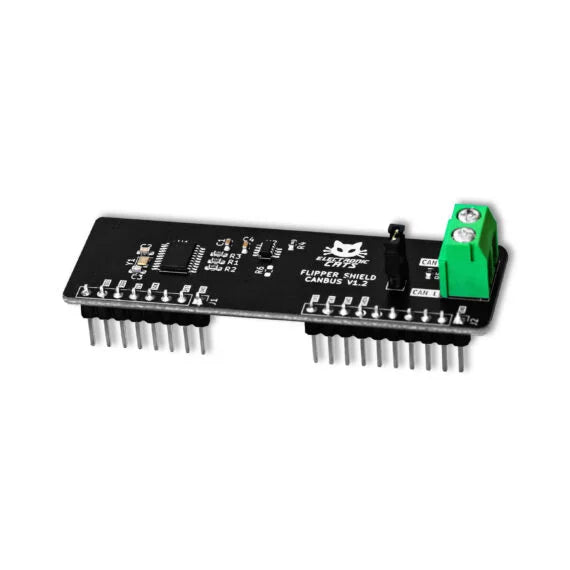
The Flipper Zero CANBus Add-On With Connector OBDII by Electronic Cats along with the MCP2515 CAN bus app allows you to interact with a CAN bus network. You can read messages that are transmitted, watch bytes from every node in the network, and catch any message/package to then resend it or send other data to the same address. Making the app a nice tool for analysis, error detection and peripherals control in a CAN bus network.
How does CAN bus work?
Controller Area Network (CAN), is a special kind of communication system designed for devices to talk to each other. It’s most commonly used in cars where it allows all the electronic control units (ECUs) to chat with each other.
Instead of a continuous flow of data, CAN bus sends information in short messages. Each message has an ID that tells the other devices what kind of data it is. This makes it easier to find specific information.
Not all messages are equal. Some messages are more important than others. CAN bus lets important messages get sent first, which is crucial in situations like when the anti-lock brakes need to talk to the engine right away.
This is one of the coolest things about CAN bus. It only uses two wires to transmit messages.
The application, besides being able to connect to canbus networks, has a
focus on vehicle auditing by communicating with the OBD II port to obtain
real-time vehicle information as well as to obtain diagnostics as a DTC
code reader does.
Tech Specs
MCP2515 is a stand-alone Controller Area Network (CAN) controller that implements the CAN specification, Version 2.0B. It is capable of transmitting and receiving both standard and extended data and remote frames. The MCP2515 has two acceptance masks and six acceptance filters that are used to filter out unwanted messages, thereby reducing the host MCU’s overhead. The MCP2515 interfaces with microcontrollers (MCUs) via an industry standard Serial Peripheral Interface (SPI).
- Operates from 2.7V-5.5V
- 5 mA active current (typical)
- Can be used as a clock source for other device(s)
- High-Speed SPI Interface (10 MHz)
| CAN Controller | MCP2515 |
| Operating Voltage | 3.3 V |
| Input Voltage (recommended) | 3.3 V |
| Protocol | CANBus |
| Compatibility | Flipper Zero |
| CAN Transceiver | MAX3051 |
| Length | 67 mm |
| Width | 21.3 mm |
Understanding Flipper Add‐On: CAN bus
Main functions
This Add-On allows you to analyse and view IoT traffic in CAN bus networks. You will be able to analyse the traffic of the signals and even replicate them to control peripherals in a CAN bus network.
Links
GitHub: https://github.com/ElectronicCats/flipper-addons/tree/main/FLIPPER_CANBUS
Wiki:
https://github.com/ElectronicCats/flipper-shields/wiki/5.-Flipper-Add%E2%80%90On:-CAN-Bus
Tutorial: https://www.hackster.io/electronic-cats/can-flipper-hack-a-car-ce7ec0
MCP2515 Datasheet: https://ww1.microchip.com/downloads/en/DeviceDoc/MCP2515-Stand-Alone-CAN-Controller-with-SPI-20001801J.pdf
NOTE: Flipper Zero is not included.
Share